
做毕设用到了ROS,这里记录ROS相关知识;
语言基于Python,因为C++短时间学不起来,Python的话还能懂一些;
工作空间构建
创建一个新的文档夹
我们创建一个新的文档夹作为新的工作空间的开始
给每个新的工作空间创建一个新的文档夹是一个好习惯,取上面名字无关紧要,但是最好能从这个名字上看出这个工作空间是干什么的,例如main_ws,(主要工作空间):
1 | mkdir main_ws |
将功能包放入src也是一个比较好的习惯,我们创建一个工作空间同时创建一个src文档夹,然后进入这个文档夹内:
1 | mkdir main_ws/src |
与ROS1不同,ROS2的工作空间并不需要init;
自定义包
如何在ROS2中创建一个功能包呢?我们可以使用这个指令:
1 | $ ros2 pkg create --build-type <build-type> <package_name> |
在ros2命令中:
- pkg:表示功能包相关的功能;
- create:表示创建功能包;
- build-type:表示新创建的功能包是C++还是Python的,如果使用C++或者C,那这里就跟ament_cmake,如果使用Python,就跟ament_python;
- package_name:新建功能包的名字。
比如在终端中分别创建C++和Python版本的功能包:
1 | cd ~/main_ws/src |
对于Python包:
只需要进到构建的包文件夹中,进入与上一层文件夹名字相同的包中即可,然后写入源文件;
 |
|---|
然后修改package.xml文件:
1 | from setuptools import setup |
编译功能包
在创建好的功能包中,我们可以继续完成代码的编写,之后需要编译和配置环境变量,才能正常运行:
1 | cd ~/main_ws #在工作空间的根目录编译 |
编译成功后,需要source一下,才能让ros识别到这个包:
注意,最好新开一个终端,而不是在当前终端;
1 | source install/local_setup.bash |
关于sourceros1和ros2有很大的不同,在install目录下会有local_setup 和setup两个文档。local_setup只会把当前工作空间中的可用包添加到环境当中,setup则会把新建该工作空间时候的底层的工作空间也加入到环境当中,这样就可用同时使用两个工作空间中的包;
因此,先sourceROS2安装时系统的setup,然后再source main_ws的local_setup,和source main_ws的setup的效果是相同的,应为main_ws这个工作空间的创建时的底层就是系统的setup;
对于存在多个工作空间的情况这种区别就会体现出来,官网对于新的工作空间叫overlay,也就是这个一个每个工作空间之间是存在覆盖累计的情况;
个人推荐首先source系统,然后对于自己创建的工作空间选择local_setup这样就会减少自己创建的多个工作空间之间的干扰。这解决了ros1上一个很头疼的问题;
自定义数据类型
在ROS2中定义接口,需要编写一个接口文档,该文档后缀为msg、srv、action
在接口文档中定义通信过程中所使用的数据类型和数据名称;
数据类型有哪些呢?
原始的数据类型只有九类,其中每一个都可以在后面加上[]将其变成数组形式(从一个变成多个)
1 | bool |
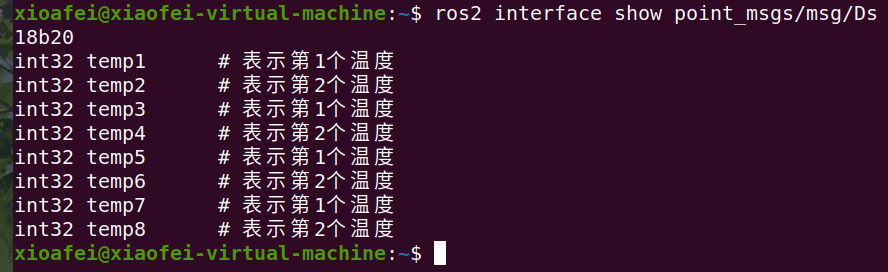
使用以下命令可以查看数据组成:
1 | ros2 interface show point_msgs/msg/Ds18b20 |
 |
|---|
如何自定义数据类型呢?
对于话题接口的定义:
你会、在包里面创建定制化的.msg和.srv文档,并且它们可在别的包内使用.所涉及的包应该放到同一工作空间下面.
建立一个新的包:
1 | ros2 pkg create --build-type ament_cmake tutorial_interfaces |
tutorial_interfaces是新包的名字.注意这是一个CMake类型的包;在单纯python包里面,目前是没有办法生成.msg或者.srv文档的.在CMake型包里面,你可以创建定制化接口,然后在python型节点中使用;
在一个包中,最后是让.msg 和.srv放在各自文档目录比较好.在目录main_ws/src/tutorial_interfaces创建文档夹:
1 | mkdir msg |
在刚刚创建的tutorial_interfaces/msg文档目录,新建一个名字为Ds18b20.msg的文档,里面放着声明数据结构的一行代码:
1 | int32 temp1 # 表示第1个温度 |
将八个32位整数称为temp1~8,这就是你的定制化消息;
3.3 CMakeLists.txt
为了将你定义的接口转为特定语言代码(如c++和python),使得这些接口可在这些语言里被使用,(为了达到这个目地你)
参考CMakeLists.txt文档:
1 | cmake_minimum_required(VERSION 3.8) |
参考package.xml文档:
1 |
|
既然你定制化接口包的组成部分都齐了,那可以编译这个包了.在工作空间根目录(~/main_ws)下,运行下面指令:
1 | colcon build --packages-select tutorial_interfaces |
现在,这些接口可以被ros2包找到了;
在新终端,main_ws工作空间运行下面指令来source一下(该空间环境变量):
1 | source ./install/setup.bash |
现在使用ros2 interface show指令来确认你的创建的接口可以使用了.
1 | ros2 interface show tutorial_interfaces/msg/Ds18b20 |
应该返回:
1 | int32 temp1 # 表示第1个温度 |
通过发布话题发布自定义数据
参考源码:
1 | import rclpy # ROS2 Python接口库 |
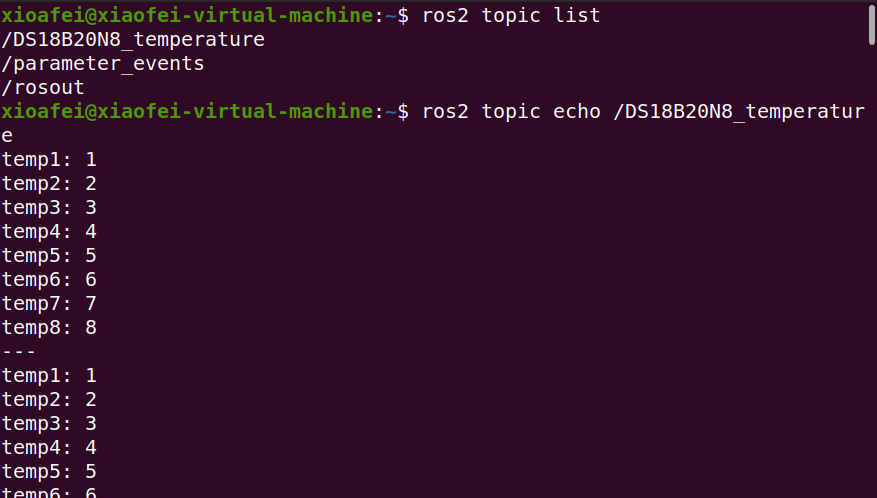
通过以下命令验证:
1 | ros2 topilist |
 |
|---|
通过订阅话题订阅自定义数据
参考源码:
1 |
ROS2 TurtleBot3
主机和树莓派的ROS_DOMAIN_ID要设置的一样才可以;
1 | export ROS_DOMAIN_ID=30 #TURTLEBOT3 |
装ROS2 TurtleBot3 的包只需要:
1 | sudo apt install ros-galatic-turtlebot3-* |
其他的包也是类似;
[TurtleBot] 启动小车
1 | ros2 launch turtlebot3_bringup robot.launch.py |
[Remote PC] 运行键盘控制节点
1 | ros2 run turtlebot3_teleop teleop_keyboard |
[Remote PC] 启动Rviz
1 | ros2 launch turtlebot3_bringup rviz2.launch.py |
[Remote PC] 查看话题
1 | $ ros2 topic list |
[Remote PC] 查看服务
1 | ros2 service list |
GAZEBO仿真
用自己做的模型替代例子包中的文件
注意点:
1、串口设备和激光雷达设备串口会干扰,且好像激光雷达默认串口ttyUSB0,因此要在开机时或者运行launch.py前拔掉自己的串口设备;
2、ros2 run nav2_map_server map_saver -f ~/map修改为:
1 | ros2 run nav2_map_server map_saver_server -f ~/map |

