
PID精进教程;
这篇文章的主要内容是如何改进初学者的PID控制器。文章中提到,初学者的PID控制器设计的目的是不规则地调用。这会导致两个问题:您无法从PID获得一致的行为,因为有时它被频繁调用,有时则没有。您需要进行额外的数学计算,以计算导数和积分,因为它们都依赖于时间的变化。作者提出了一种新的方法,称为“Proportional on Measurement”,可以解决这些问题。
任何编写自己的 PID 算法的人都可以看看我是如何做的,并可以从中学到他们需要的东西。
这将是一个艰难的过程,但我想我找到了一种不太痛苦的方式来解释我的代码。我将从所谓的“初学者的 PID”开始。然后我将逐步改进它,直到我们得到一个高效、健壮的 pid 算法。
PID的开始
这是初学PID的人都知道的公式:
公式(2)也就是指偏差e等于设定值和当前值的差别;
根据这个公式,大多数都能写出下面的代码:
1 | /*working variables*/ |
Compute()被定期或不定期地调用,并且运行良好。不过,这个系列并不是关于“工作得很好”。如果我们要将这段代码变成与工业 PID 控制器相当的东西,我们必须解决一些问题:
采样时间(Sample Time):PID 算法在定期被调用时最佳。如果算法运行间隔固定,我们还可以简化一些内部数学运算。
微分冲击(Derivative Kick):微分冲击是一种在PID控制器中出现的现象,它会导致PID控制器的输出出现尖峰,从而影响系统的稳定性;不是什么大问题,很容易修复;
即时调节变化(On-The-Fly Tuning Changes):也即在运行时进行调整;一个好的 PID 算法是一种可以在不影响内部工作的情况下改变调节参数的算法;
复位积分误差抑制(Reset Windup Mitigation):复位积分误差抑制是一种用于控制系统中的PID控制器的技术,它可以防止PID控制器在某些情况下产生积分误差。;
开/关(自动/手动)(On/Off (Auto/Manual)):在大多数应用中,有时会希望关闭 PID 控制器并手动调整输出,而不受控制器的干扰;
初始化(Initialization):当控制器第一次打开时,我们需要一个“无扰动转换”。也就是说,我们不希望输出突然猛增到某个新值;
控制器方向(Controller Direction):具体来说,控制器方向是指控制器的输出如何随着输入信号的变化而变化。如果控制器的输出随着输入信号的增加而增加,那么这个控制器就是正向控制器;如果控制器的输出随着输入信号的增加而减少,那么这个控制器就是反向控制器。它旨在确保用户使用正确的符号输入调整参数;
按比例测量(Proportional on Measurement):按测量比例是指控制器输出的变化量与被控制量的变化量成比例。添加此功能可以更轻松地控制某些类型的过程;
一旦我们解决了所有这些问题,我们就会有一个可靠的 PID 算法。我们还将拥有最新版本的 Arduino PID 库中使用的代码,这并非巧合。因此,无论您是想编写自己的算法,还是想了解 PID 库中发生的事情,我希望这对您有所帮助。让我们开始吧。
PS:在的所有代码示例中,我使用的是double。因为在 Arduino 上,双精度与浮点数(单精度)相同。真正的双精度对 PID 来说太浪费了(精度过高)。如果你使用的语言是真正的双精度,我建议将所有双精度数更改为浮点数。
采样时间
文章中提到,为了确保定期调用PID,可以指定每个周期调用计算函数。根据预先确定的采样时间,PID决定是否应立即计算或返回。一旦我们知道PID以恒定间隔进行评估,也可以简化微分和积分计算。
问题
初学者的PID被设计为不定期地调用。这导致了两个问题:
1、你不能从PID中获得一致的行为,因为它有时被频繁调用,有时不被调用。
2、你需要做额外的数学运算来计算导数和积分,因为它们都依赖于时间的变化。
解决方法
确保PID以固定的时间间隔被调用。我决定这样做的方法是指定每个周期调用计算函数。根据预先确定的采样时间,PID决定它是否应该计算或立即返回。
一旦我们知道PID是以恒定的时间间隔被运行的,所以导数和积分的计算也可以被简化。
代码
1 | /*working variables*/ |
在第10行和第11行,算法现在通过判断来决定是否该计算了。另外,因为我们现在知道两个样本之间的时间是相同的,我们不需要不断地乘以时间变化。我们只需适当地调整Ki和Kd(第31行和第32行),结果在数学上是等同的,但更有效率。
如果用户在操作过程中决定改变采样时间,Ki和Kd将需要重新调整以反映这种新的变化,这就是第39-42行的全部内容。
另外请注意,我在第29行将采样时间转换为秒数。严格地说,这不是必须的,但允许用户以1/秒和s为单位输入Ki和Kd,而不是1/mS和mS。
结果
上面的修改为我们做了3件事:
1、无论调用Compute()的频率如何,PID算法将以固定的时间间隔被运行[第11行] 。
2、因为有了时间减法[第10行],当millis()返回0的时候就没有问题了。
3、我们不需要再对时间变化进行乘除运算了。由于它是一个常数,我们可以将它从计算代码中移出[第15+16行],并将其与PID常数放在一起[第31+32行]。在数学上,它的结果是一样的,但它节省了每次评估PID时的乘法和除法。
关于中断
如果这个PID要进入一个微控制器,可以用一个非常好的理由来证明使用中断。SetSampleTime设置了中断频率,然后在时间到了时调用Compute。在这种情况下,就不需要第9-12、23和24行了。如果你打算在你的PID系统中这样做,那就去做吧! 不过要继续阅读这个系列。希望你仍能从后面的修改中得到一些好处。
我没有使用中断的原因有三个:
1、就这个系列而言,不是每个人都能使用中断。
2、如果你想让它同时实现许多PID控制器,事情会变得很棘手。
3、如果我说实话,我并没有想到这一点。Jimmie Rodgers在为我校对该系列文章时建议我这样做。我可能决定在未来版本的PID库中使用中断。
微分冲击
问题
此修改将稍微调整导数项。目标是消除一种称为“微分冲击”的现象。
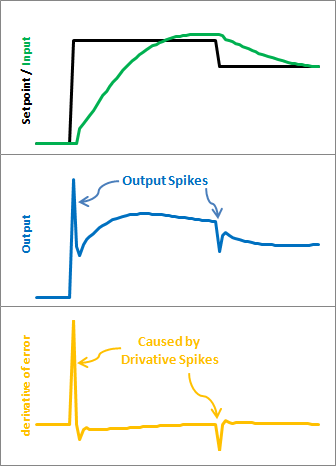
上面的图片说明了这个问题。由于误差=设定-输入,设定点的任何变化都会导致误差的瞬时变化。这个变化的导数是无穷大(在实践中,由于dt不是0,它只是一个非常大的数字)。幸运的是,有一个简单的方法可以摆脱这种情况。
解决办法
当设定值保持不变时:
事实证明,误差的导数等于输入的负导数,但设定点变化时除外。这最终成为一个完美的解决方案。我们不是加(Kd*误差的导数),而是减(Kd*输入的导数)。这就是所谓的使用 “测量导数”(Derivative on Measurement)。
代码
1 | /*working variables*/ |
这里的修改很容易。我们用-dInput代替+dError。我们现在不是记住最后的错误,而是记住最后的输入值。
结果
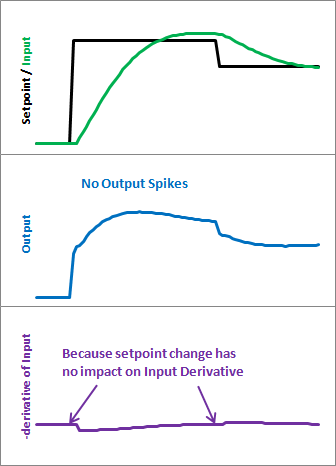
下面是这些修改给我们带来的结果。请注意,输入的情况仍然是一样的。所以我们得到了同样的性能,但我们不会在每次设定点变化时发出巨大的输出尖峰。
这可能是也可能不是一个大问题。这完全取决于你的应用对输出尖峰有多敏感。但在我看来,这也不需要更多的工作,为什么不把事情做对呢?

